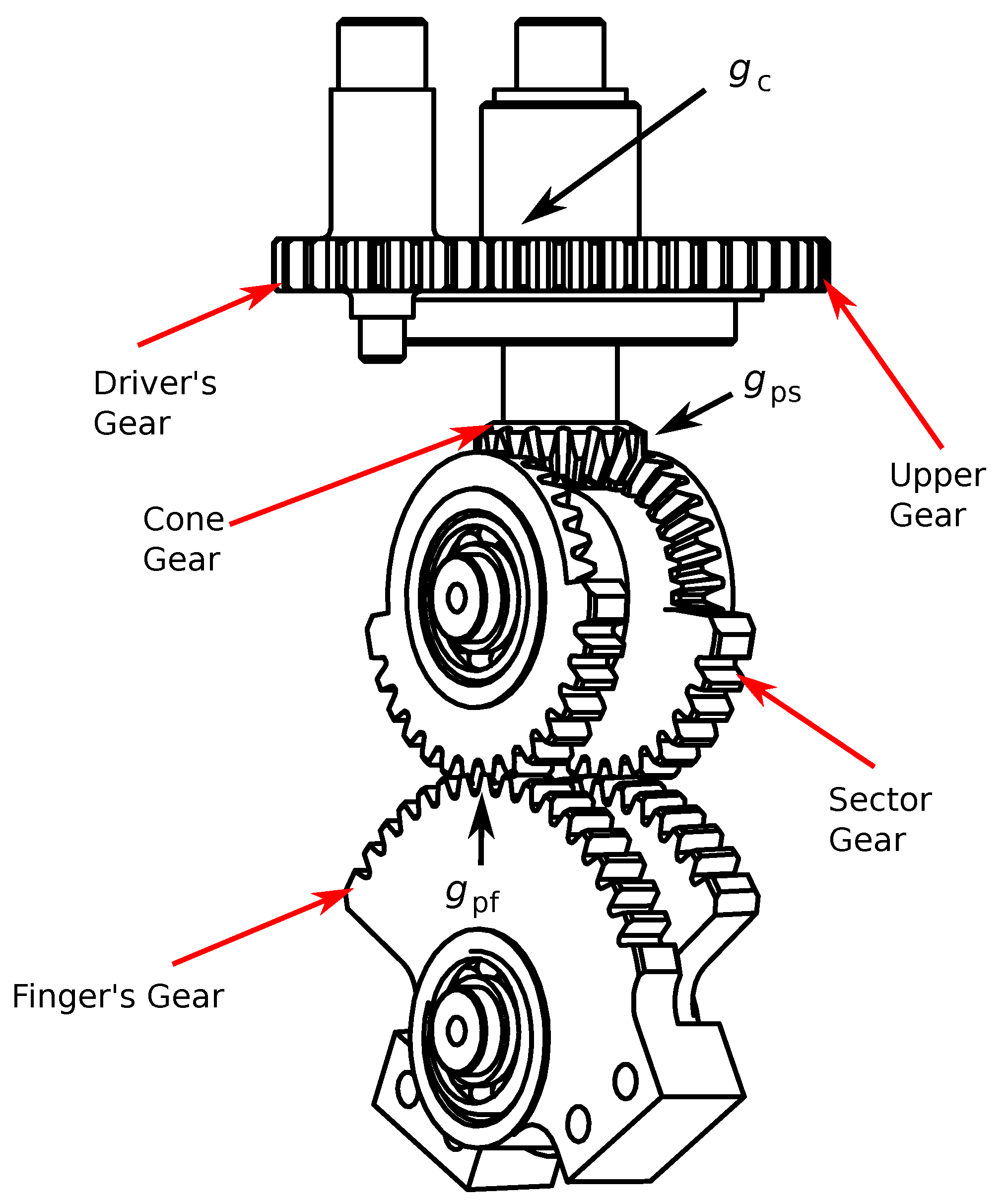
The final design constrains gripper travel using a pair of bearing

Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.

Applied Sciences October-2 2023 - Browse Articles
Robotics, Free Full-Text

Cosmoclench Gripper, PDF, Screw

EP3420938A1 - Surgical instruments with open and closable jaws and axially movable firing member that is initially parked in close proximity to the jaws prior to firing - Google Patents

Compliant Manipulators

Active debris removal: A review and case study on LEOPARD Phase 0-A mission - ScienceDirect

MR-Conditional Actuations: A Review

Cosmoclench Gripper, PDF, Screw

Joseph FOLEY, Professor (Assistant), PhD, Reykjavik University, Reykjavík, School of Science and Engineering
The final design constrains gripper travel using a pair of bearing

US6691860B2 - Gripper mechanism for handling a cylindrical workpiece - Google Patents